
Plexe 3.2 is now ready for download!
Plexe version 3.2 has been released. Upgraded to Veins 5.3.1, SUMO 1.22.0, compatible with OMNeT++ 6.2.0, and supporting heterogenous technologies.
All the new features »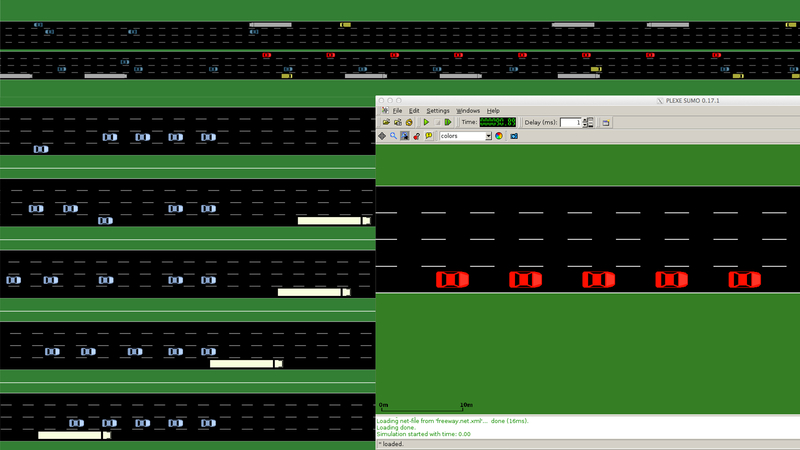
Realistic simulation of platooning systems
Plexe features state-of-the-art cruise control models and realistic vehicle and engine dynamics
Examples »Plexe is a cooperative driving framework extending SUMO and Veins permitting the realistic simulation of platooning (i.e., automated car-following) systems. It features realistic vehicle dynamics and several cruise control models, permitting the analysis of control systems, large-scale and mixed scenario, as well as networking protocols and cooperative maneuvers. It is free to download and easy to extend.
If you use Plexe, please cite our work as
![]() Michele Segata, Renato Lo Cigno, Tobias Hardes, Julian Heinovski, Max Schettler, Bastian Bloessl, Christoph Sommer and Falko Dressler, "Multi-Technology Cooperative Driving: An Analysis Based on PLEXE," IEEE Transactions on Mobile Computing (TMC), 2022.
[DOI, BibTeX, Details...]
Michele Segata, Renato Lo Cigno, Tobias Hardes, Julian Heinovski, Max Schettler, Bastian Bloessl, Christoph Sommer and Falko Dressler, "Multi-Technology Cooperative Driving: An Analysis Based on PLEXE," IEEE Transactions on Mobile Computing (TMC), 2022.
[DOI, BibTeX, Details...]
Core contributors
News
- Plexe-3.2 released (2025-09-01): The newest version supports Simu5G, the newest versions of OMNeT++ and Veins, plus additional new features. Please check the features page for more details.
- Plexe-3.1.3 released (2024-06-01): The newest version features a refactored lane change model, enabling platoons to change lane autonomously and without causing collisions, thus fixing a long lasting instability of the code base. Please check the lane change model documentation
- New "Getting Started" tutorial (2023-11-14): Thanks to Lorenzo Ghiro, we now have a tutorial on how to use Plexe APIs and create your own protocol. The step-by-step tutorial implements a leave-at-back maneuver from scratch. See here for more details.
- Plexe-3.1 released (2023-02-24): The newest version includes several new features and bugfixes, including support for VLC and LTE C-V2X Mode 3. See here for more details.
- Plexe-3.0 released (2021-04-27): The newest version includes several new features and bugfixes. See here for more details.